UC Berkeley CADathon - Spring 2023
This was the first ever CADathon put on by the American Society of Mechanical Engineers at UC Berkeley. The format resembled a hackathon, with teams of 2-4 being given a design prompt and 12 hours to CAD and make a portfolio based on a design prompt. I entered this competition with my partner, Meta Zhou.

Background
The prompt that was revealed at the beginning of the event was to design an autonomous robot to clean a conference room table in a space hotel rocket. The robot needed to clean all foreign elements, solid and liquid, and because we chose the more advanced challenge, also had to ignore obstacles like notebooks, laptops, and other elements that should not be touched. In addition, the robot had to secure itself for takeoff and landing.
Design
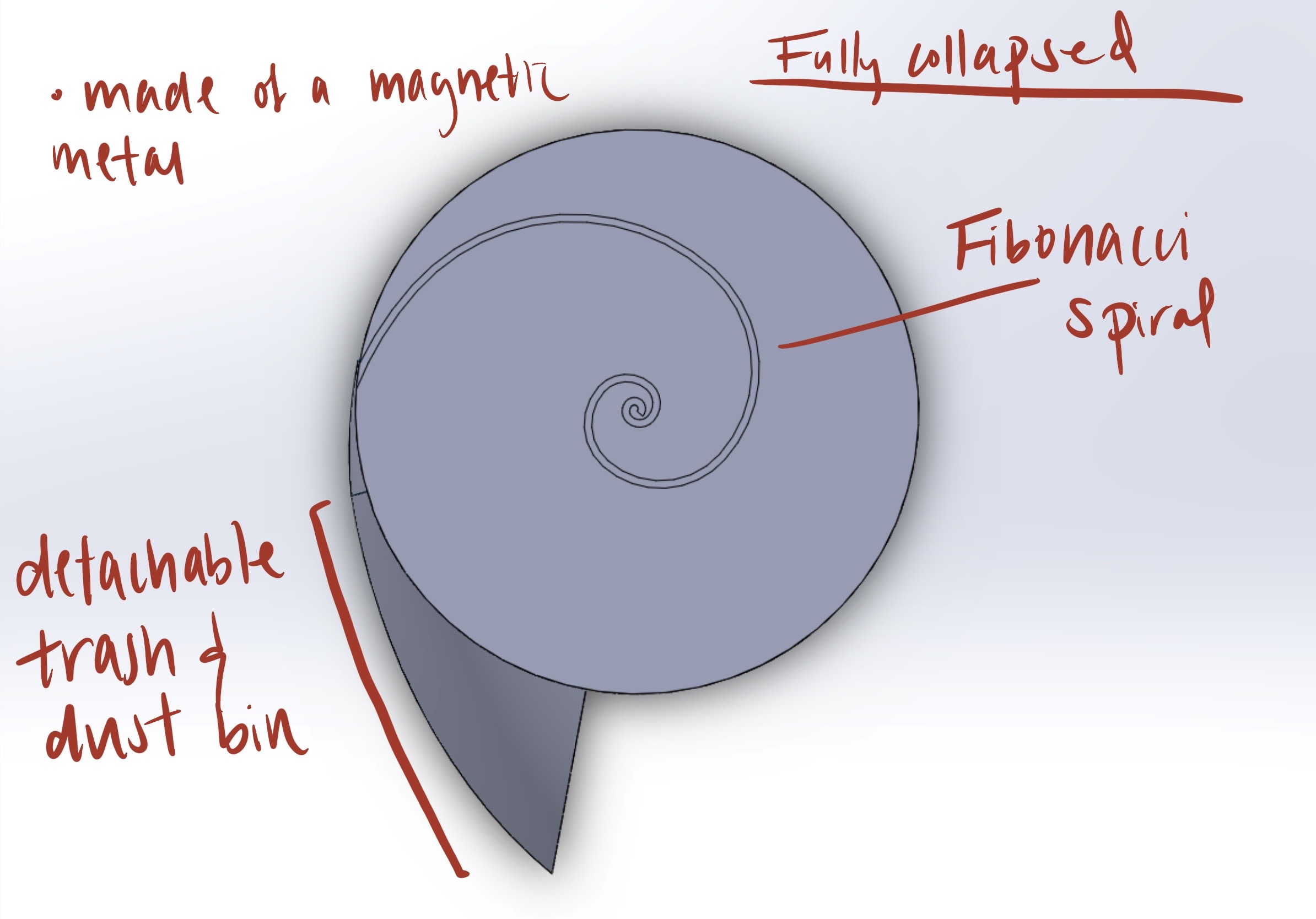
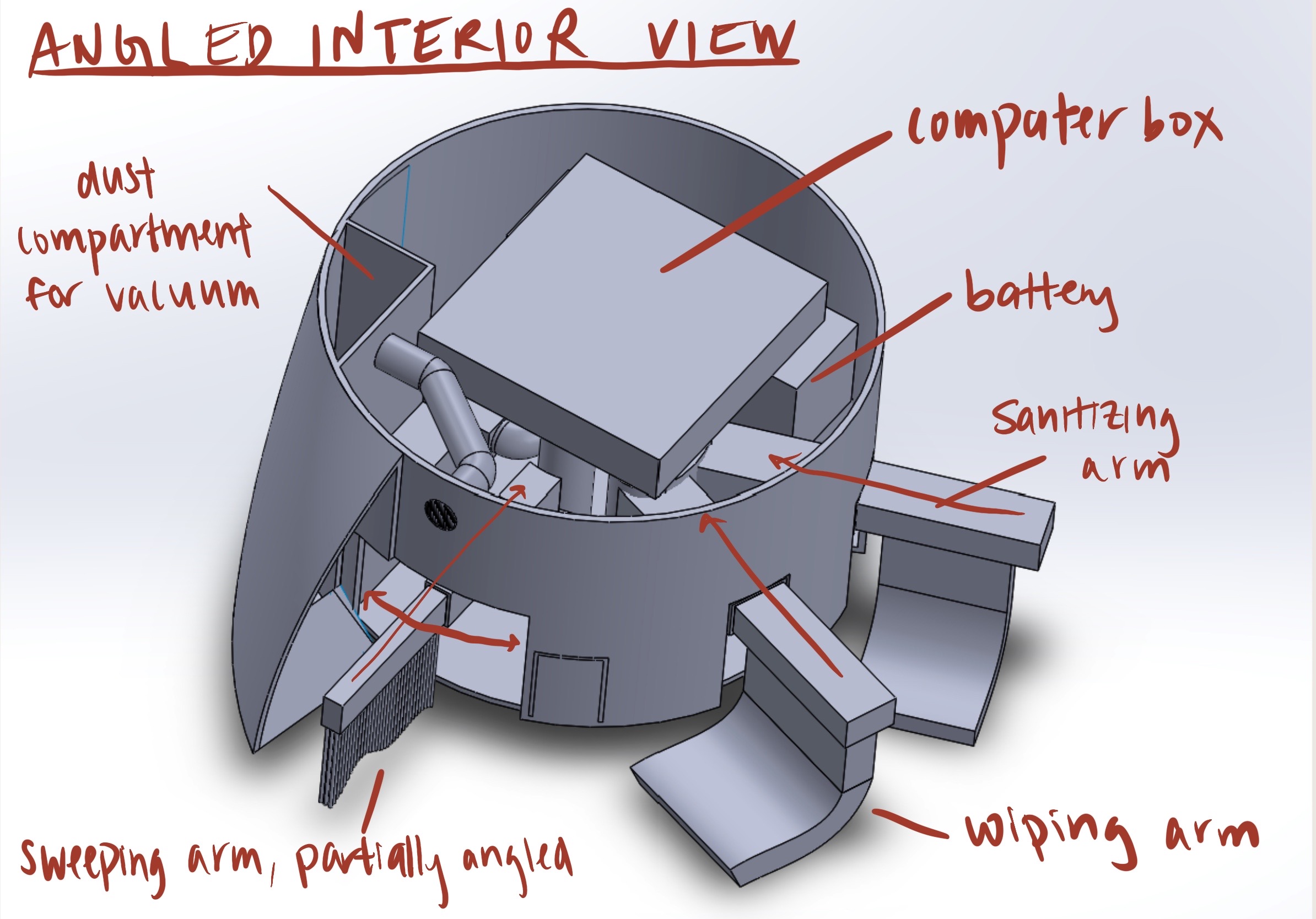
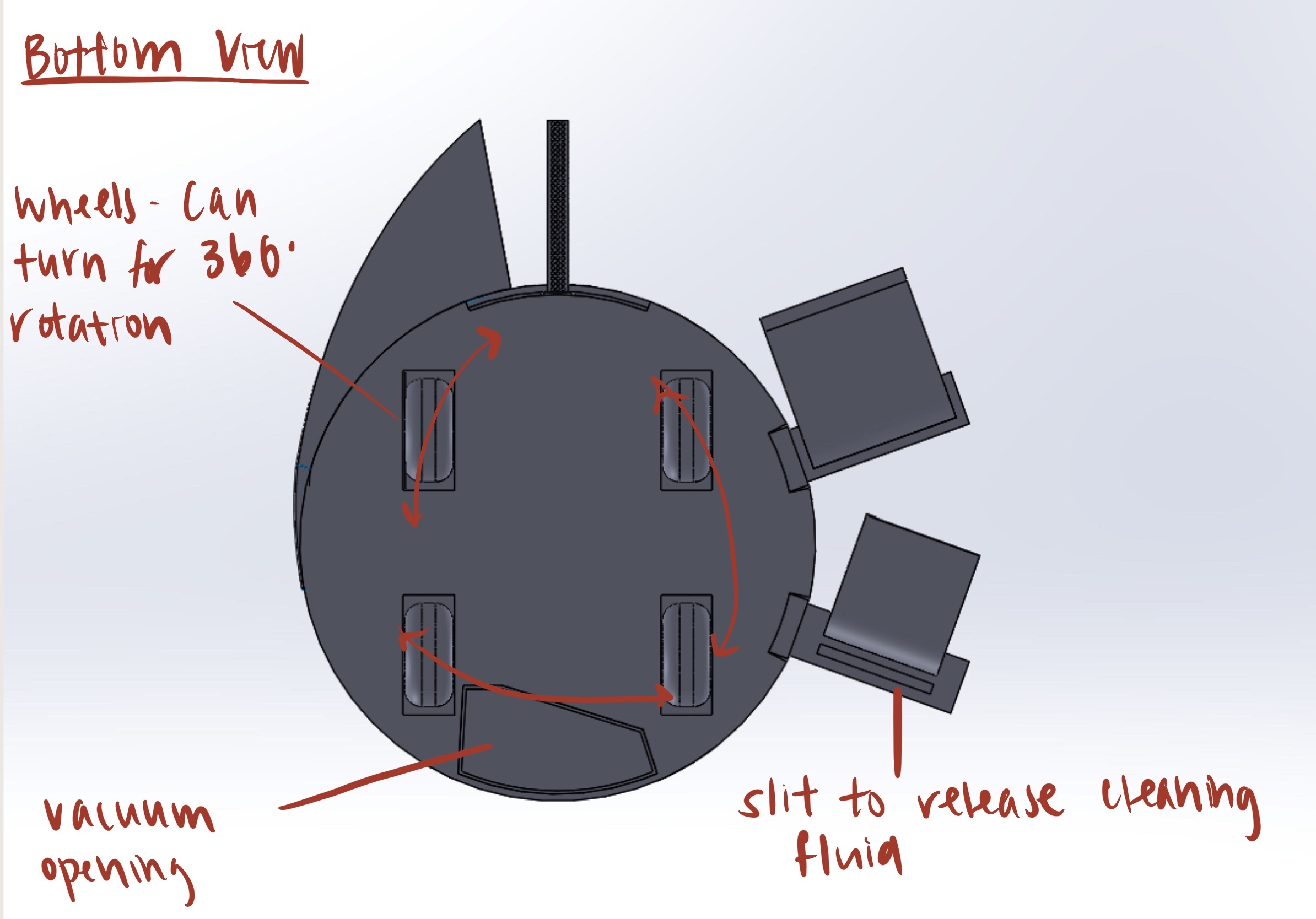
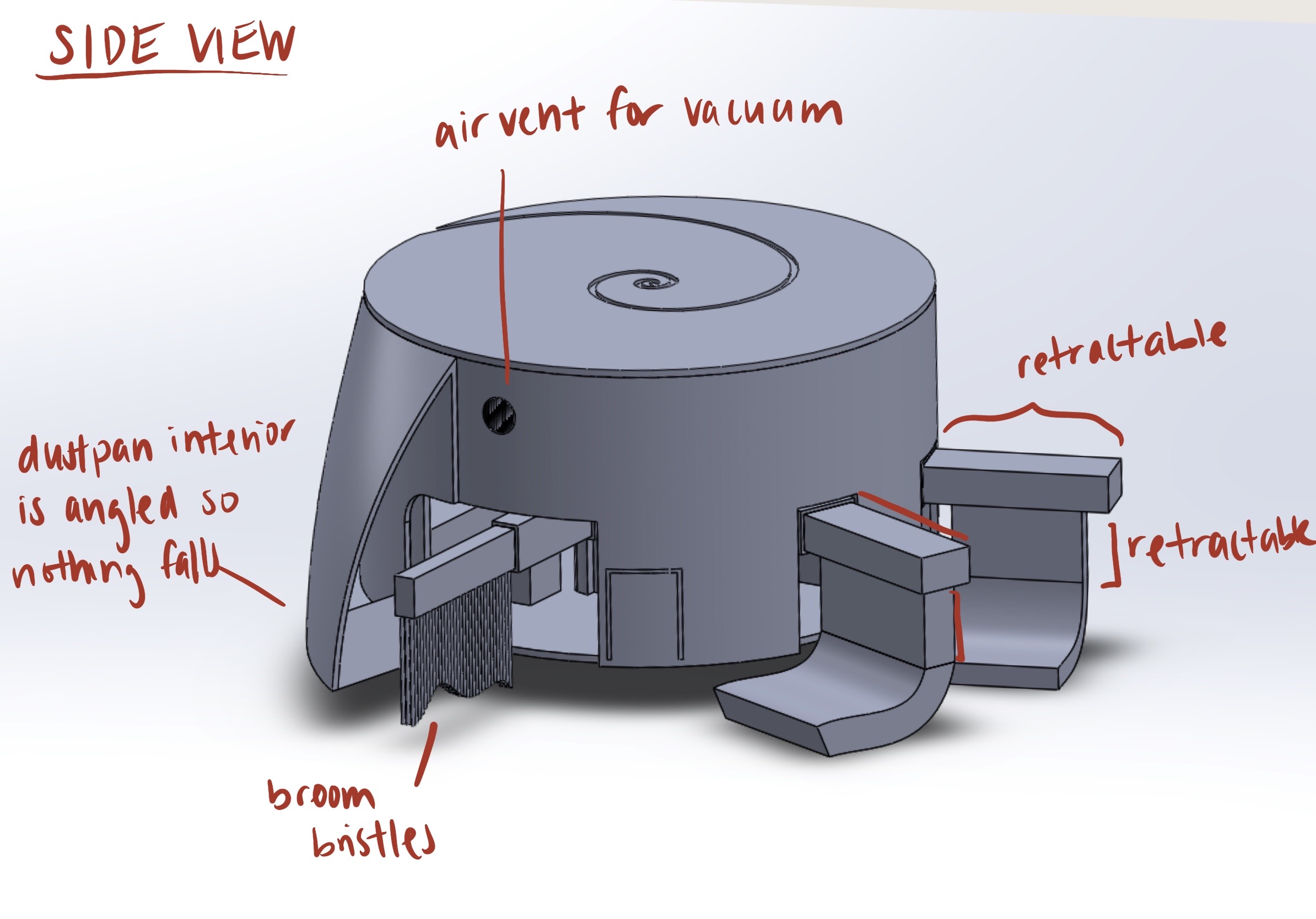
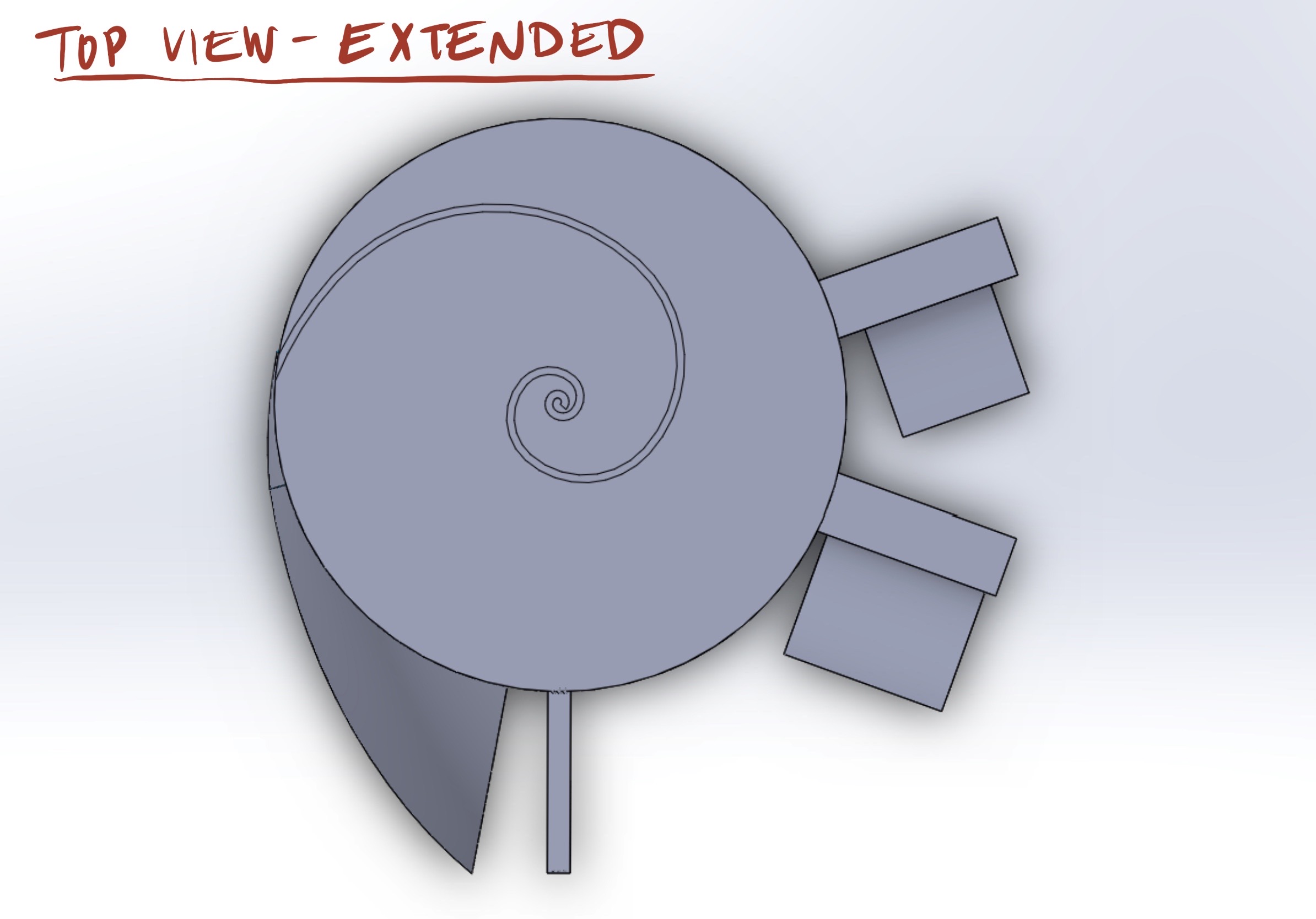
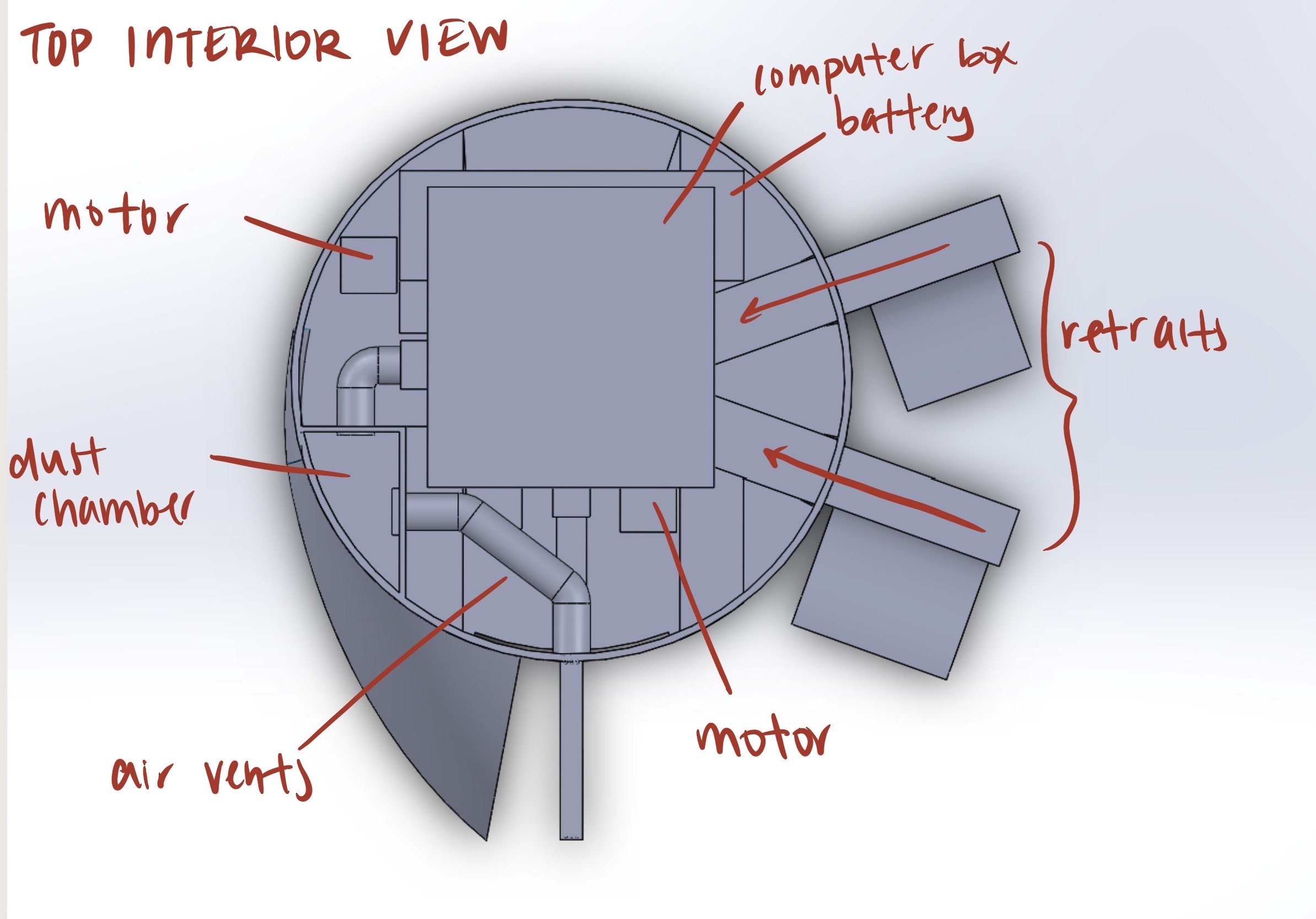
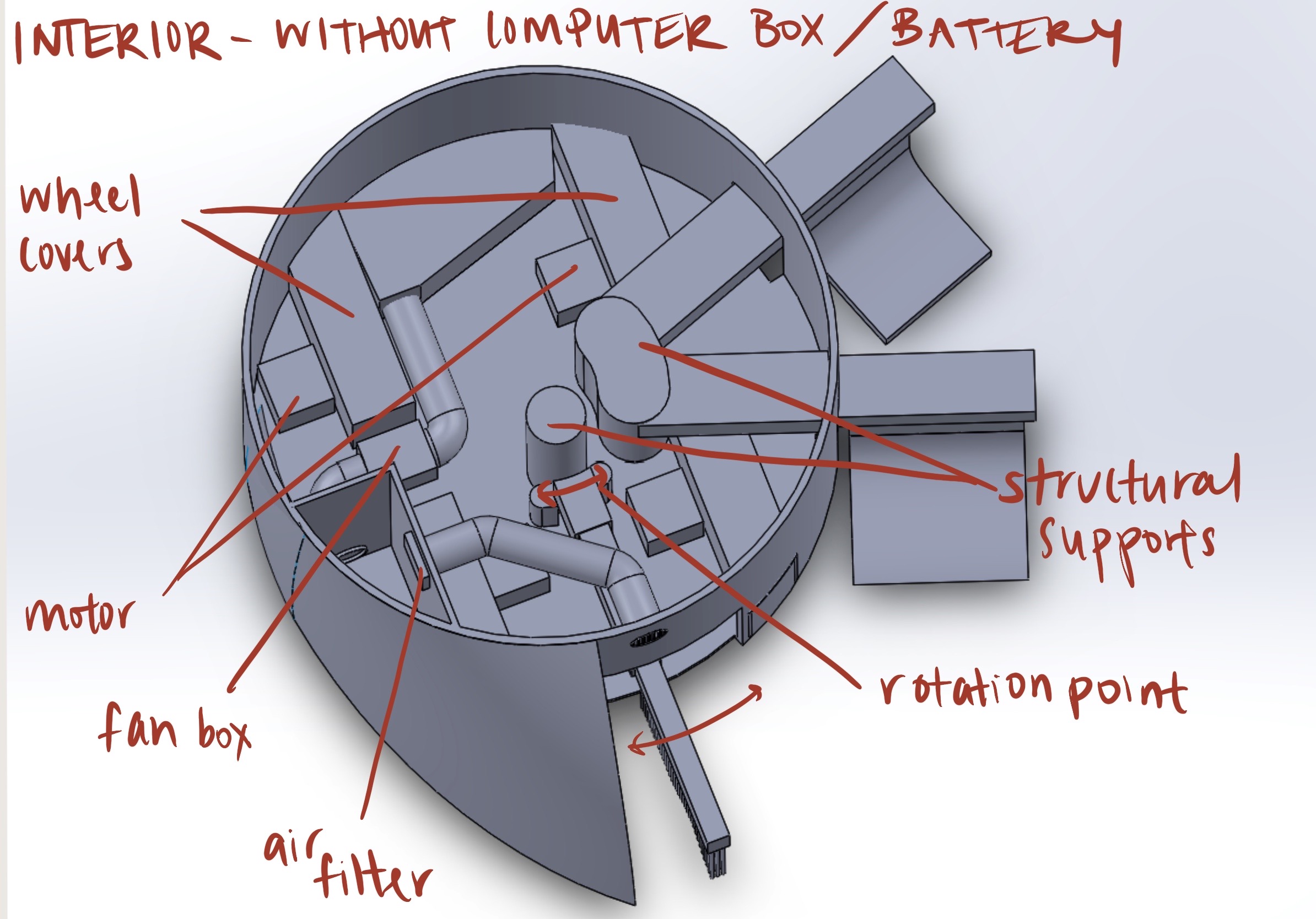
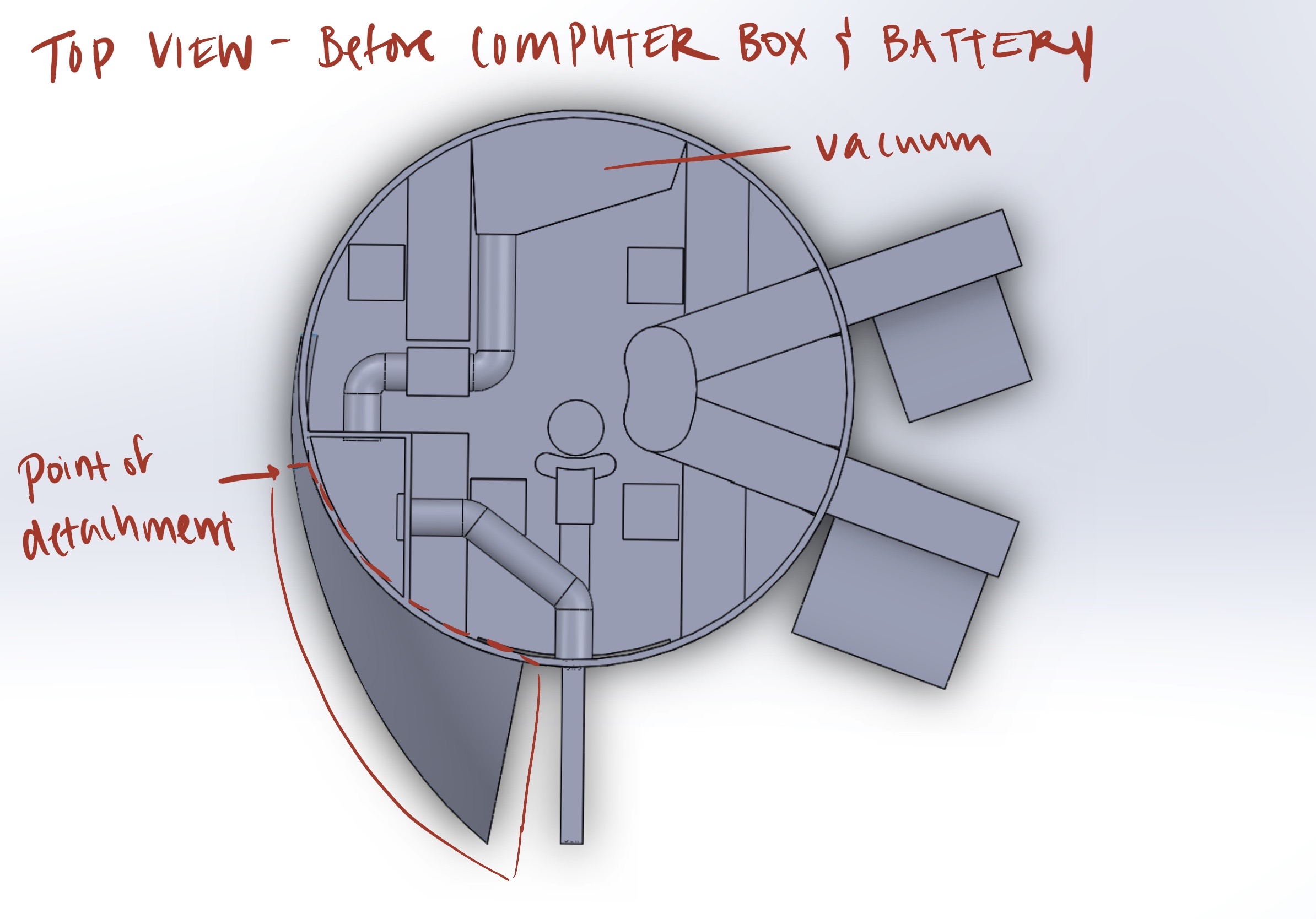
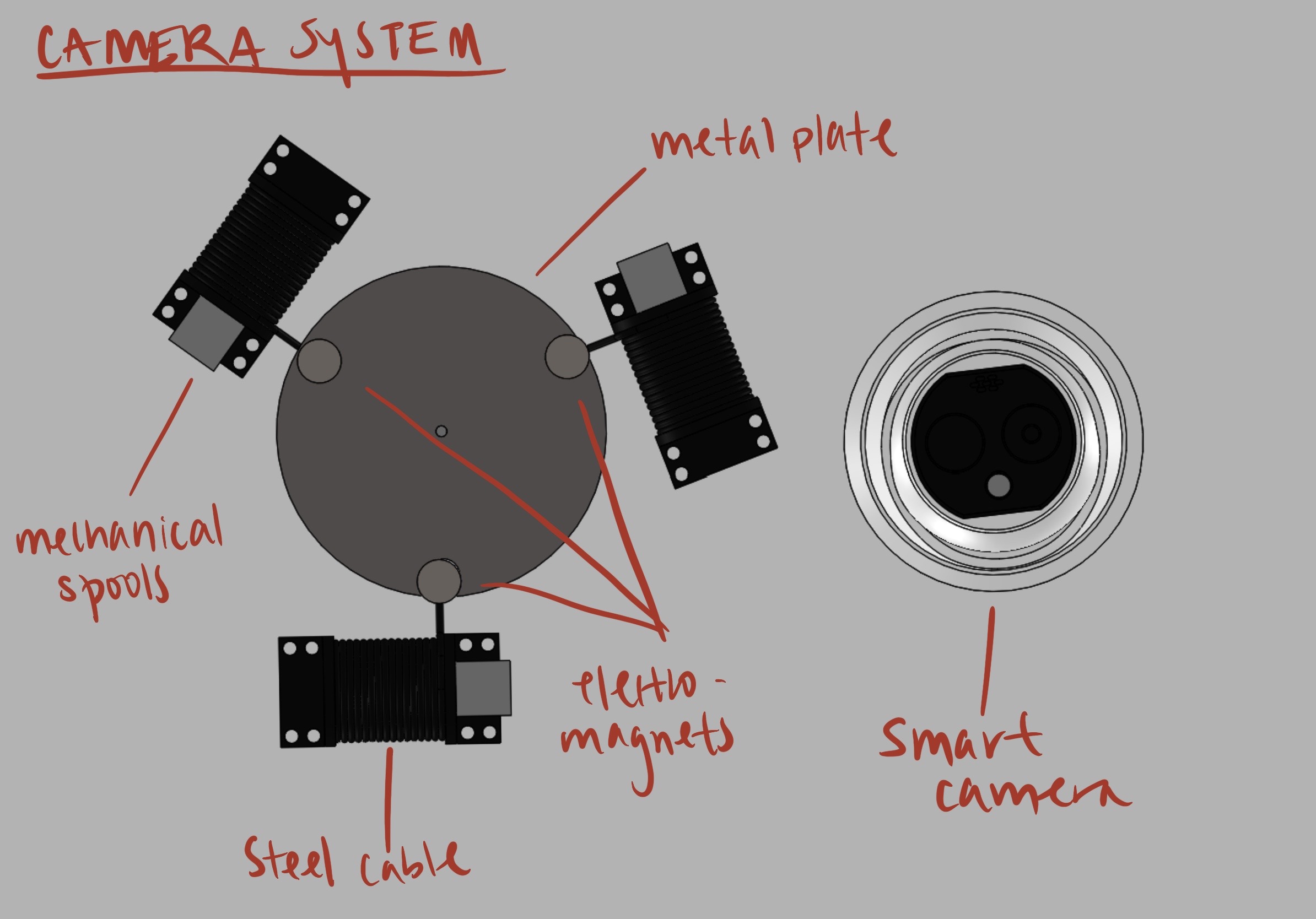
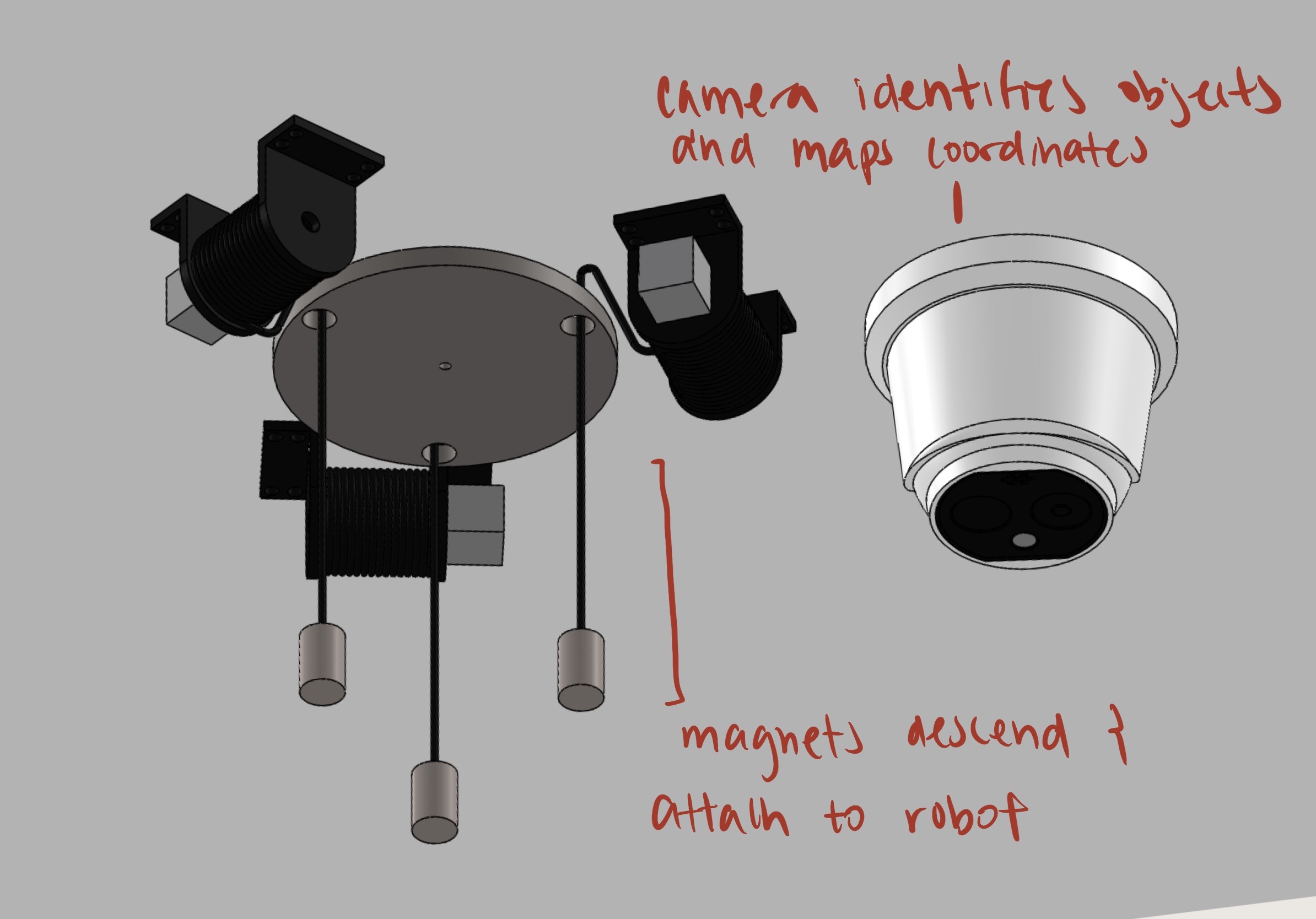
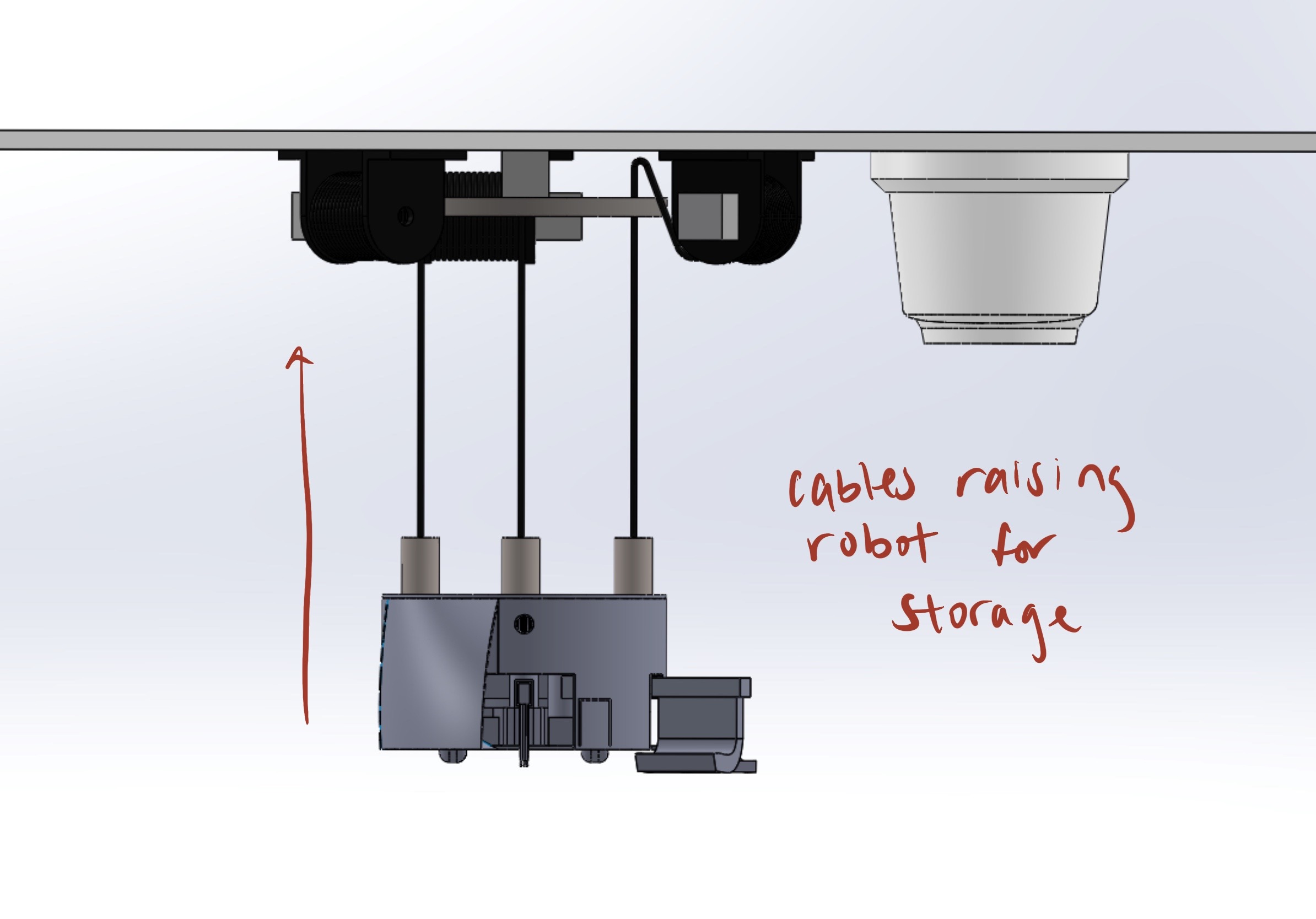
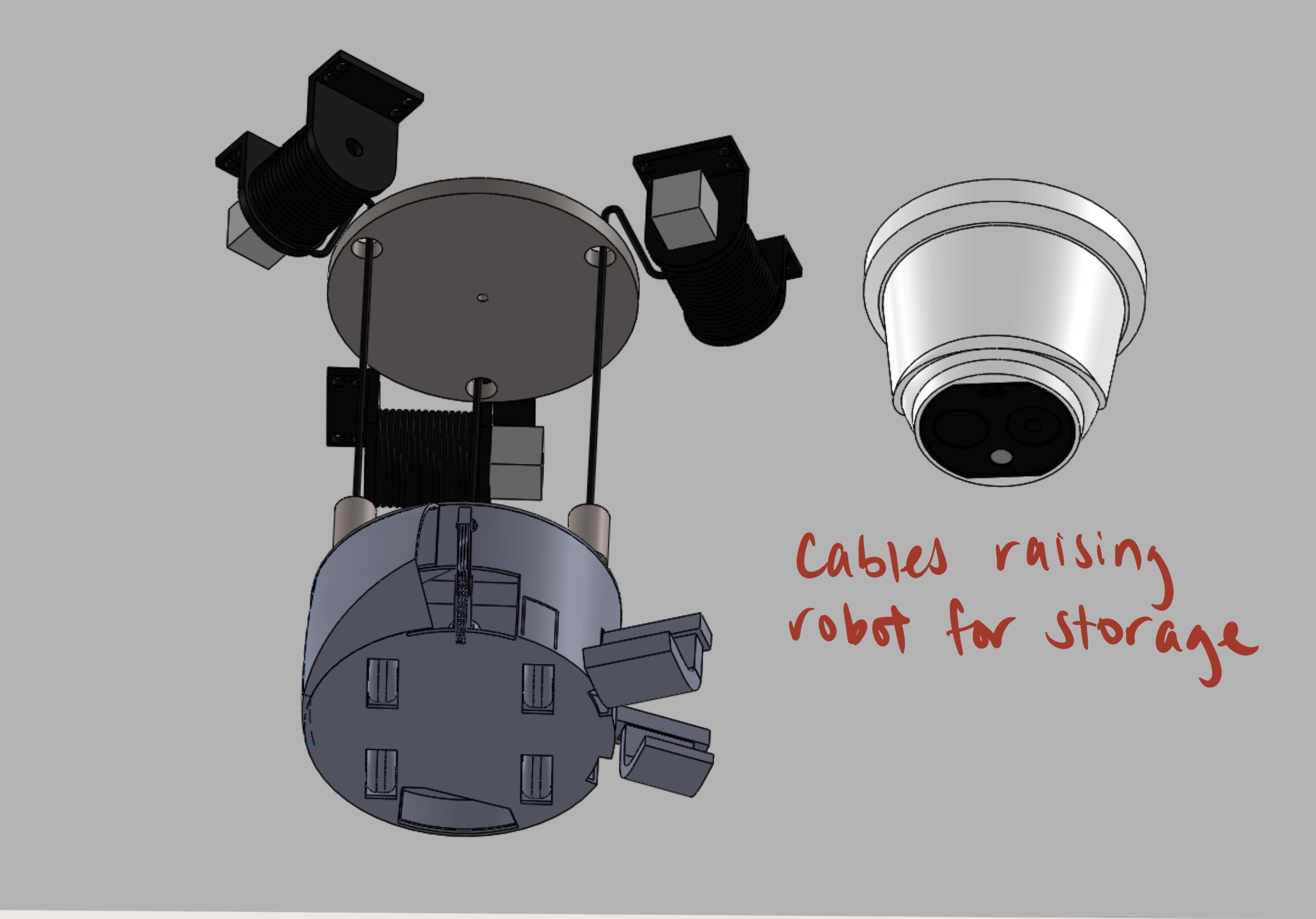
Meta and I went back and forth on potential designs, eventually deciding on a roomba-type robot that would descend from the ceiling. Under the team name “Cookie Jar Robotics” (after the only food we brought to sustain ourselves), we began sketching a robot based off of the golden ratio. We outlined clear design considerations, then divided the necessary functions into a sequence of steps. For object identification, a ceiling mounted camera with an object recognition AI locates and determines objects on the table that need to be avoided, communicating this with the robot. The robot is lowered onto the table via three pulleys with electromagnets, which disarm and release the robot before ascending back to the ceiling. The robot rounds the table, using a retracting sweeping arm to push any loose trash into its removable waste bin. Next, the robot circles the table with its vacuum, located opposite the sweeping arm, picking up any loose dust and crumbs. The vacuum motor and fan, tubing, opening, air vent, and dust compartment have all been planned out. The next step is the wiping arm and cleaning spray, which pick up any remaining dust, crumbs, liquids, and any other unwanted substances. Finally, the sanitizing arm runs over the entire table, ensuring no sticky residues and a clean feeling. All arms on the robot are capable of retracting, and the robot has independently controlled wheels to allow for rotation about its center axis and coverage of the entire table.
Reflection
While we unfortunately did not win the CADathon competition, we learned valuable lessons for the next one. Primarily, we discovered that the portfolio was graded with more weight than the CAD. We spent a disproportionate amount of time thinking through the design process and modeling the robot compared to writing the report. This is a lesson on communication, as it does not matter how good your idea is if you are unable to explain it to others. While we were proud of our idea, our presentation could have been improved. Based on the grades given by the judges, our only other area in need of major improvement was our manufacturability. This was something we neglected to focus on in favor of well thought out robotic processes, but something we will be sure to focus on in future competitions.